
摘要:,,本文介绍了野火PID调试与优化的全过程,从入门到精通。通过逐步讲解PID的基本原理和调试方法,帮助读者掌握PID控制器的设置与调整技巧。文章还深入探讨了优化PID参数的方法,以提高控制系统的性能和稳定性。对于初学者和资深工程师都具有重要的参考价值。
本文目录导读:
PID(比例-积分-微分)控制作为控制理论的重要组成部分,广泛应用于各种系统中,野火PID调试则是在特定应用场景下,针对PID参数进行优化调整的过程,本文将详细介绍野火PID调试的基本原理、步骤、优化方法以及常见问题与解决方案,帮助读者更好地理解和应用PID控制。
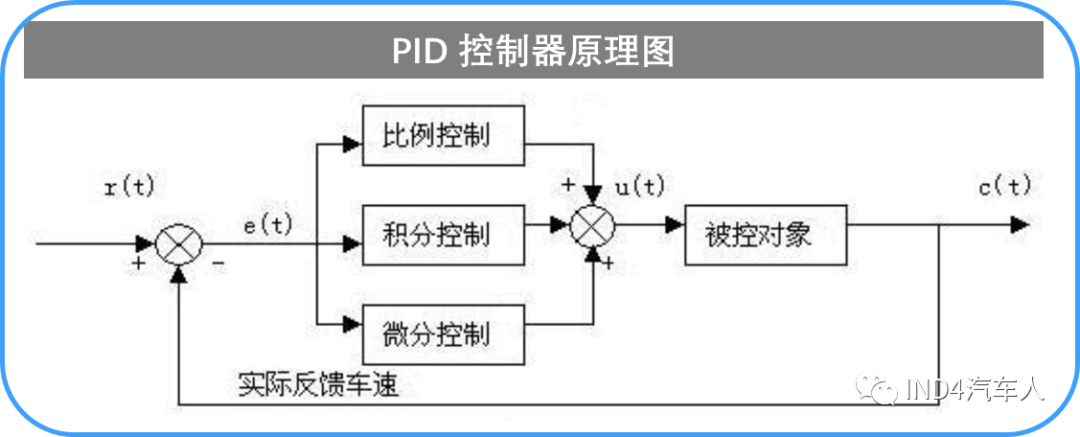
PID控制原理
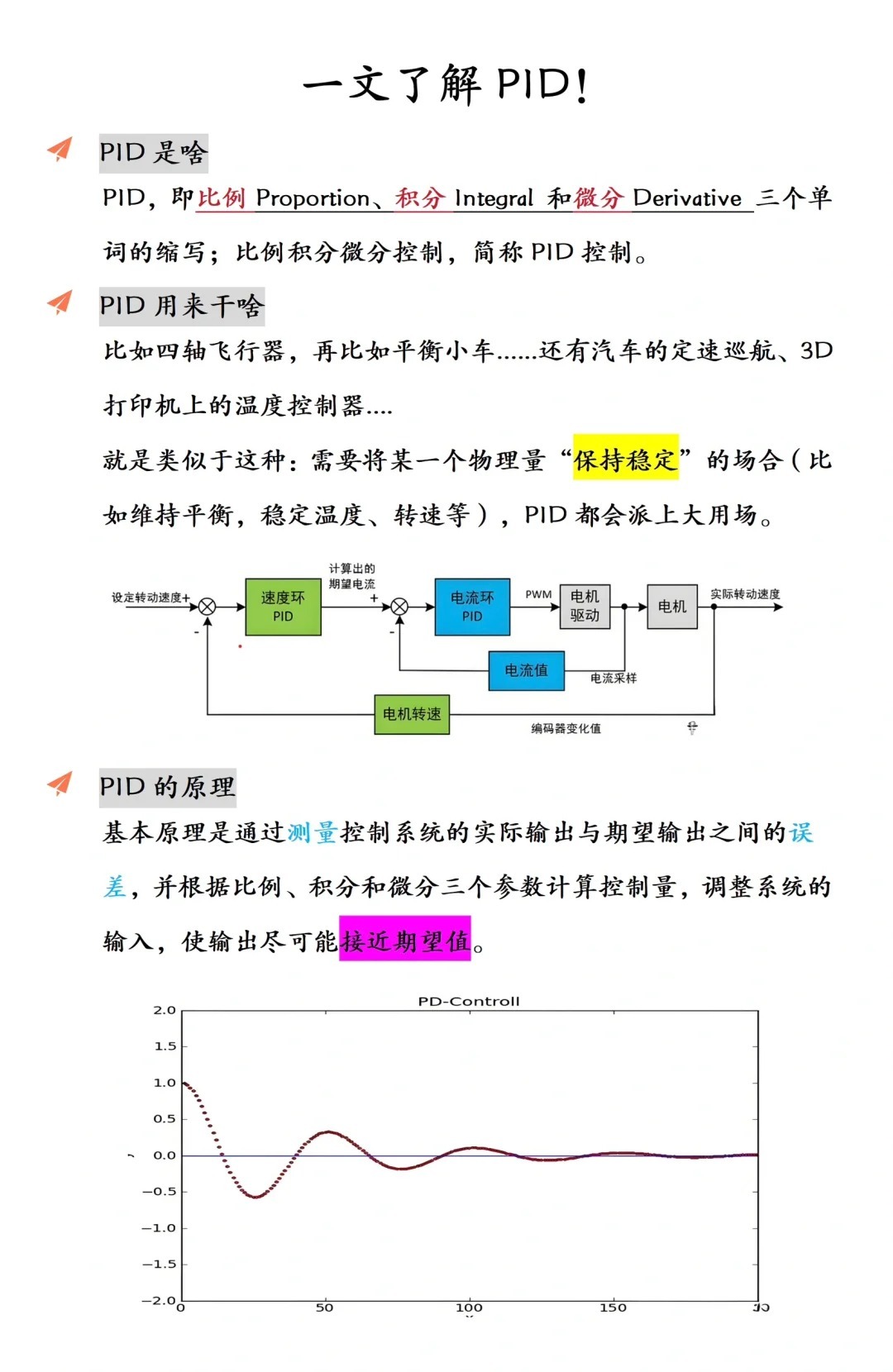
PID控制器通过比较实际过程输出与期望设定值之间的差异,计算误差,并根据误差产生比例(P)、积分(I)和微分(D)信号,以调整系统性能,比例项用于快速响应误差,积分项解决稳态误差问题,微分项则用于抑制系统过冲和振荡。
野火PID调试步骤
1、系统初始化:设定初始的PID参数,如比例增益Kp、积分时间Ti和微分时间Td。
2、系统运行:让系统按照设定参数运行,观察实际输出与期望输出之间的差异。
3、数据记录:记录运行过程中出现的误差、系统响应速度、超调量等数据。
4、参数调整:根据记录的数据,对PID参数进行调整,包括增加、减小或重置Kp、Ti和Td。
5、反复调试:重复步骤2至步骤4,直至系统性能达到最佳状态。
野火PID调试优化
1、响应速度优化:通过调整比例增益Kp,提高系统响应速度,适当增加Kp值可以加快系统响应,但过大可能导致系统不稳定。
2、稳态误差优化:积分项主要用于消除稳态误差,适当调整积分时间Ti,可以减小稳态误差,提高系统精度。
3、系统稳定性优化:微分项主要用于抑制系统过冲和振荡,通过调整微分时间Td,可以提高系统稳定性,在实际调试过程中,还需考虑微分项对噪声的敏感性。
常见问题与解决方案
1、问题:系统响应速度慢。
答案:增加比例增益Kp,提高系统响应速度,检查系统是否存在其他延迟环节,如传感器、执行器等,进行相应调整。
2、问题:系统超调量大,稳定性差。
答案:减小比例增益Kp,增加微分时间Td,以抑制系统过冲和振荡,适当调整积分时间Ti,避免积分项引起的系统不稳定。
3、问题:稳态误差无法消除。
答案:增加积分时间Ti,减小积分饱和现象,检查系统是否存在非线性环节,如饱和非线性、死区等,进行相应处理。
4、问题:系统对噪声敏感,性能不稳定。
答案:在调整微分项时,考虑加入滤波器或降低微分项的增益,以减少噪声对系统的影响,检查系统硬件是否存在问题,如传感器噪声、执行器抖动等,进行相应处理。
野火PID调试是一个复杂而重要的过程,通过本文的介绍,读者可以了解PID控制原理、野火PID调试步骤、优化方法以及常见问题与解决方案,在实际应用中,还需根据具体系统的特点进行调试和优化,不断积累经验,提高PID控制水平,希望本文能对读者在野火PID调试方面提供一定的帮助和启示。
附录
1、PID控制器参数调整表:记录调试过程中的参数调整情况,便于分析和优化。
2、调试数据记录表:记录系统运行过程中的误差、响应速度、超调量等数据,便于分析和调整参数。
3、常见PID控制器类型介绍:了解不同类型PID控制器的特点和应用场景,有助于选择合适的控制器进行调试和优化。
4、野火PID调试案例分析:通过实际案例的解析,让读者更好地理解野火PID调试的过程和方法。
 浙ICP备14032885号-5
浙ICP备14032885号-5